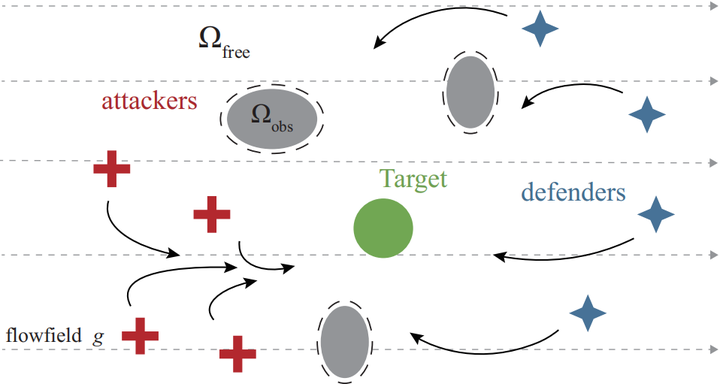
 Illustration of a multi-agent reach-avoid game using game theory and reachability analysis based on dynamics flowfields.
Illustration of a multi-agent reach-avoid game using game theory and reachability analysis based on dynamics flowfields.Abstract
A deterministic and stochastic hybrid dynamics system is essential for dealing with the complex behaviour and stochastic optimal control among multiple agents in a reach-avoid game. Considering the heterogeneous interactions among multiple agents of a complex system, many challenges remain in implementing such a hybrid system. In this paper, a deterministic and stochastic dynamics model for the reach-avoid games is decoupled into a non-cooperative probabilistic game and a cooperative probabilistic game. Nash equilibrium and finite-time stability with collision free are guaranteed in the non-cooperative probabilistic game that is based on the strategy from zero-sum game analysis. In the cooperative probabilistic game, the DCFCI strategy is facilitated to achieve collision-free and cross-interception by using probabilistic reachability analysis to reveal the high-probability interception region presented in this paper. The feasibility of the proposed two probabilistic games is demonstrated by simulation results, where the stationed and unstationed attacker cases are successfully detected and implemented.