FlexNet for Cooperative Herding
 An overview of FlexNet with an open-formation and field of view configuration for cooperative capture in pursuit-evasion games.
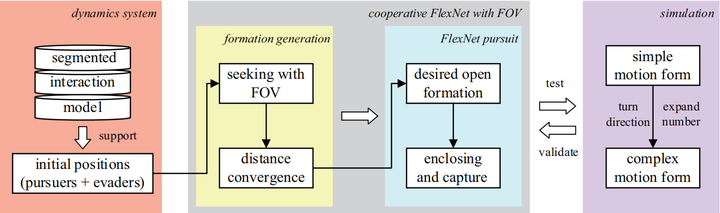
An overview of FlexNet with an open-formation and field of view configuration for cooperative capture in pursuit-evasion games.We propose an open formation (FlexNet) of pursuers to achieve effective capture of adversarial evaders. We expand the evader’s locomotion after equipping each pursuer with a finite FOV. Inspired by the interaction dynamics between agents during the herding process, a new segmented interaction model is developed for the evader to describe the influence of the pursuers. As shown in the figure, the pursuers with limited FOV first seek the evader and generate the desired formation. By gradually adjusting the size of the FlexNet, the pursuers finally achieve cooperative herding of the evader.

